- Elicited zero-shot manipulation of articulated objects of various masses from off-the-shelf VLMs across 5 tasks
- Composed forceful skills in two-step process: spatial reasoning about an image labeled with the robot coordinate frame and physical reasoning about object mass, torques, and object-surface interactions.
- Observed jailbroken behaviors emergent from this reasoning process, addressed in a separate RSS workshop paper.
- Presented poster at Reasoning for Robust Robot Manipulation in the Open World Workshop @ Robotics: Systems and Science (RSS) 2025
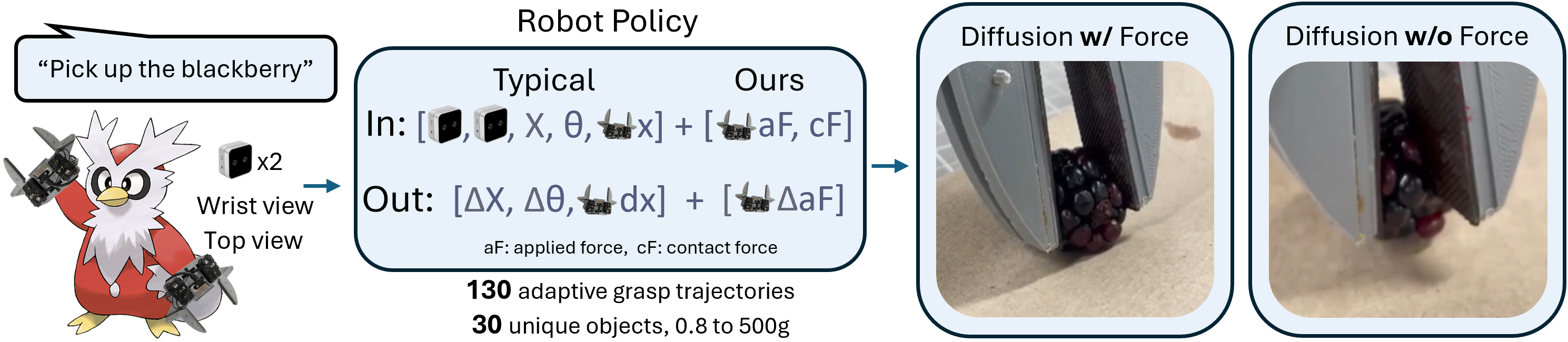
- Showed that grasping diffusion policies conditioned with contact force feedback improved grasp success and minimized object damage compared to policies without force feedback.
- Force-conditioned diffusion policies generalized better to novel delicate fruits, vegetables, and objects.
- Presented poster at Mastering Robot Manipulation in a World of Abundant Data Workshop @ Conference on Robot Learning (CoRL) 2024
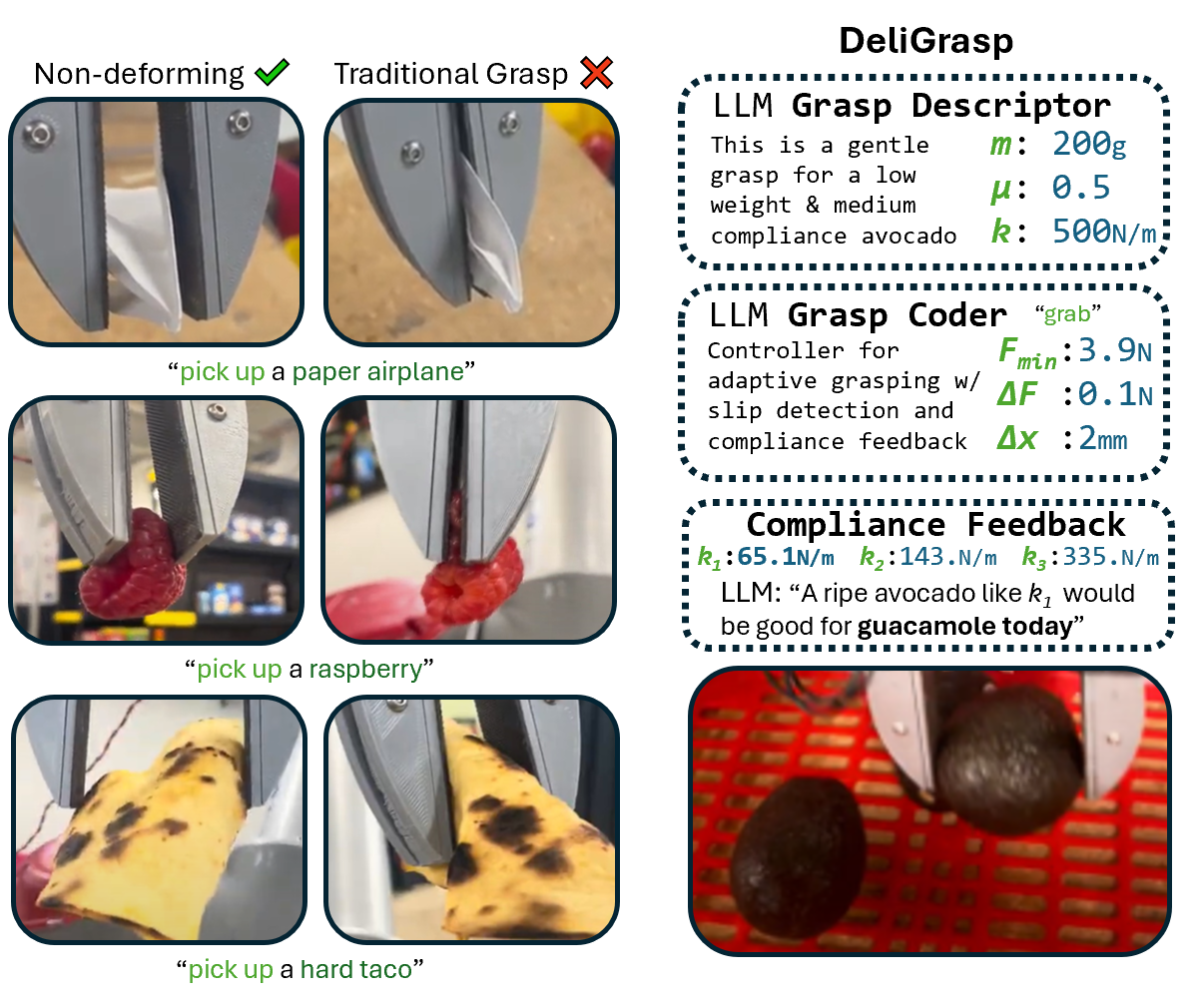
- Demonstrated state-of-the-art single-controller grasping success on delicate objects such as raspberries and paper origami
- Leveraged world-model estimation of object mass, friction, and compliance to simplify and inform low-level grasp optimization
- Fine-tuned language models on object properties improved mass estimation by 10% and grasp success on aberrant objects.
- Presented poster at Conference on Robot Learning (CoRL) 2024
Wearable Rings with Deep Gesture Recognition, 2022 Summer Research Internship at Snap Inc.

- Developed lightweight set of two wearable rings enabling real-time detection of five distinct finger gestures with 95% accuracy
- Investigated feature learning from novel MEMS magnetic field sensors and reconstructed hand pose kinematics with a modified FABRIK solver
- Time-series transformer model generalized to varied hand morphologies, sizes, and gesture styles.

- Developed, in team of four students, novel assistive walking device mechanisms: modular handles, eddy current brake powered resistive wheels, and variable, controllable weight support
- Utilized FEA and dynamics analysis in SolidWorks, Inventor CAM, waterjetting, CNC milling, laser cutting, 3DP, and 20+ prototype iterations over 2 semesters to create product
- Leverages COTS push down rollator
- For 2021-2022 Columbia Mechanical Engineering Senior Design
- Team: Daniel Kwon, Delphine Lepeintre, William Xie, Eric Xue
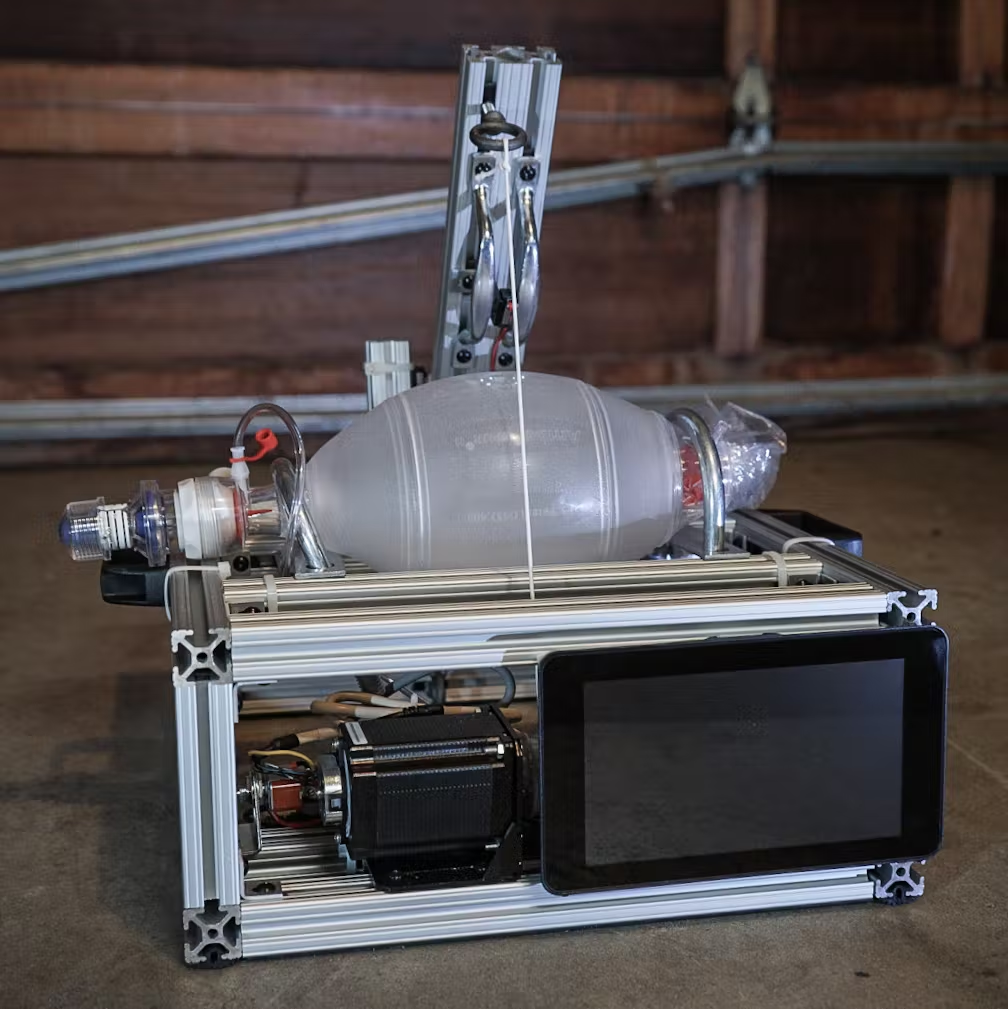
- Developed, in team of five students, open-source, fully COTS solution; purchasable with under $900 and able to be assembled within 2 hours
- Awarded $8000 to engineer rapid response, emergency ventilator for COVID-19 patients out of 80 proposals
- Implemented real-time performant control system and user interface in Python, PyQt with a Raspberry Pi 3
- Team: Noah Silverstein, Delphine Lepeintre, William Xie, David Kao, Eric Xue, Neil Nie, Jonathan Sanabria
- Interactive web tool for learning Cantonese medical terminology with audio pronunciation
- Covers introductions, complaints, medications, and patient history questions, vetted by Cantonese doctors from NYC and HK
- Built with Python text-to-speech pipeline for Cantonese audio generation
- Built in collaboration with Fiona Hui (NYU) and the Cantonese Medical Handbook team
Collaborations with Mimi Park
Dawning: dust, seeds, Coplees (2022, repo)

- Collaborated with sculptor Mimi Park for gallery show to create bespoke kinetic sculptures
- Co-ideated, designed, and crafted autonomous cars with Arduinos, DC motors, feathers, pipe cleaner, chimes, and steel wireframe
- Shown at Lubov in Spring 2022, as reviewed in Hyperallergic
"Gorbachev" (2021, repo)

- Developed walking, organically shaped quadrupedal robot resembling the Venezuelan Poodle Moth
- CAD Model
Gallery View
Making of Gorbachev